一、Android 传感器概览
Android 设备都有内置传感器,用来测量运动、屏幕方向和各种环境条件。这些传感器能够提供高度精确的原始数据,用来监测设备的三维移动或定位,或监测设备周围环境的变化。比如 游戏利用重力传感器,已以推断出复杂的用户手势和动作,如倾斜、摇晃、旋转或挥动;天气应用可以温度传感器和湿度传感器来计算和报告露点;旅行应用则可以使用地磁场传感器和加速度计来报告指南针方位。总结来讲,Android平台支持三大类传感器:
这类传感器测量三个轴向上的加速力和旋转力。这个类别中包含加速度计、重力传感器、陀螺仪和旋转矢量传感器。
这类传感器测量各种环境参数,如环境气温、气压、照度和湿度。这个类别中包含气压计、光度计和温度计。
这类传感器测量设备的物理位置。这个类别中包含屏幕方向传感器和磁力计。
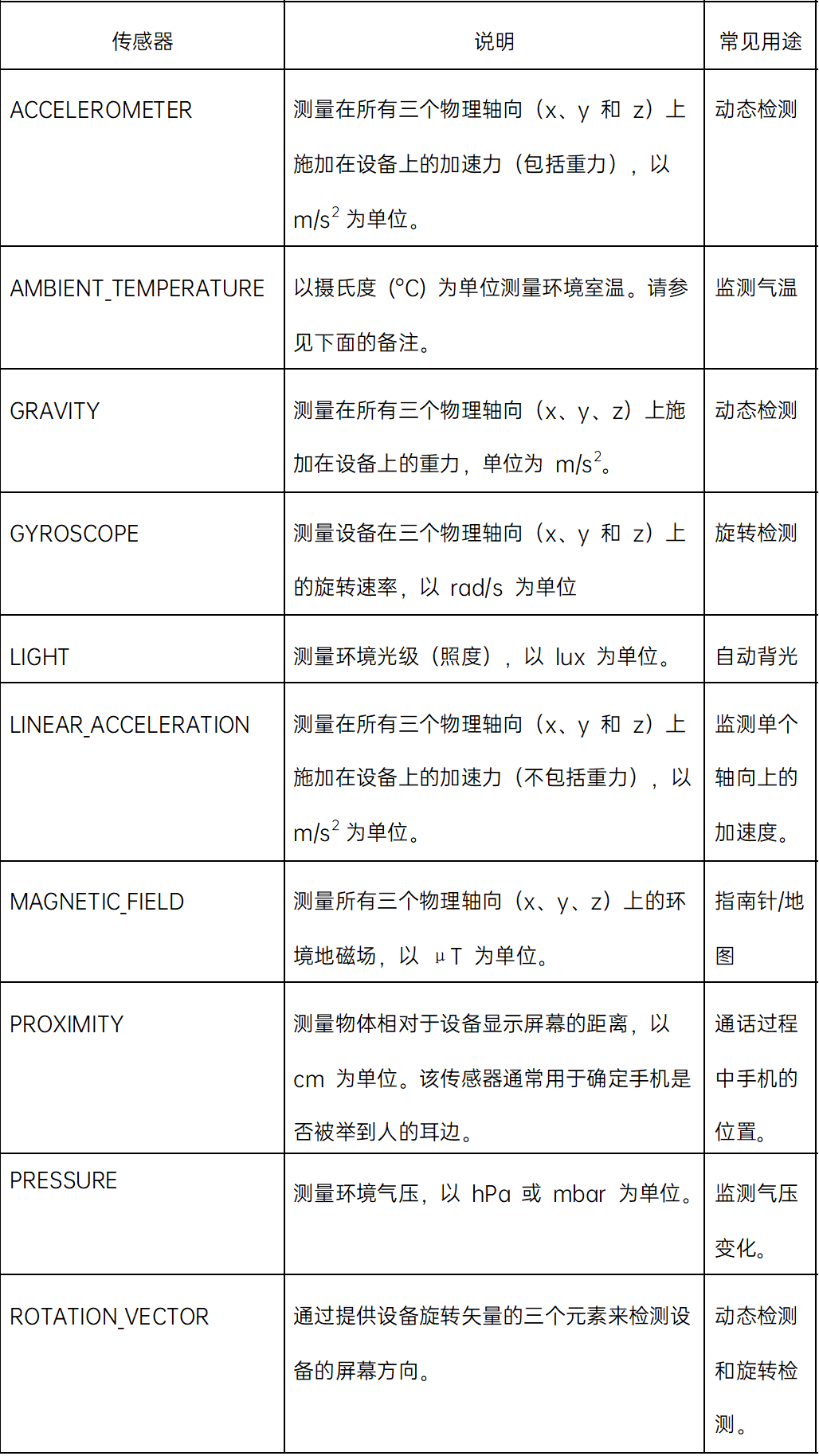
Android 平台支持的常见传感器类型说明如下表:
二、传感器坐标系
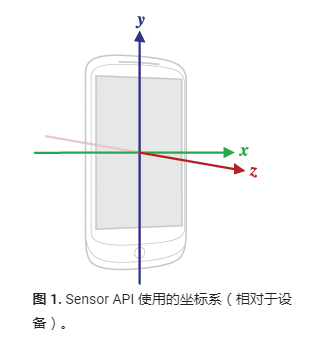
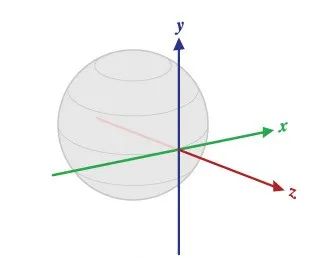
对于大多数传感器,当设备处于默认屏幕方向时,会相对于设备屏幕来定义坐标系(参见图 1)。X 轴为水平向右延伸,Y 轴为垂直向上延伸,Z 轴为垂直于屏幕向外延伸。在此坐标系中,屏幕后面的坐标将具有负 Z 值。以下传感器使用此坐标系:
三、动态传感器
本文重点介绍动态传感器。Android 平台上提供多种传感器,可让监视设备的运动,如:基于硬件的加速度计传感器、陀螺仪传感器和基于软件融合的重力传感器、线性加速度传感器、旋转矢量传感器。
运动传感器在监控设备运动方面(例如倾斜、晃动、旋转或摆动)非常有用。该移动通常是用户直接输入的反映(例如,用户在游戏中驾驶汽车,或在游戏中控制球),但也可能反映设备所处的物理环境(例如,在开车时与人一起移动)。在第一种情况下,监控是相对于设备参照系或应用参照系的运动;在第二种情况下,监控是相对于世界参照系的运动。运动传感器本身通常不用于监视设备位置,但可以与其他传感器(例如地磁场传感器)一起使用,以确定设备相对于世界参照系的位置。
1. 加速度计传感器
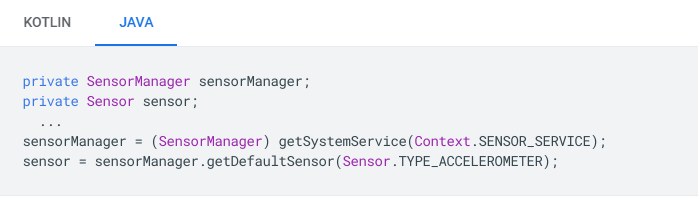
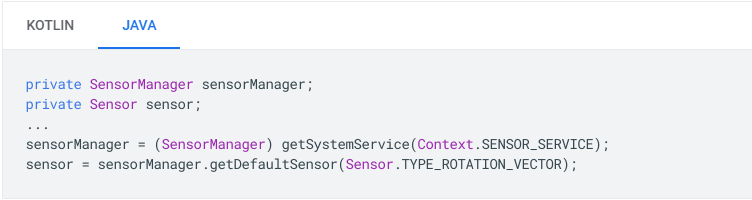
加速度传感器测量施加到设备的加速度,包括重力,单位是米/秒2。以下代码展示如何获取默认加速传感器的实例:
从概念上讲,加速度传感器通过使用以下关系测量施加到传感器本身的力 (Fs) 来确定施加到设备的加速度 (Ad):
但是,重力始终叠加在加速度计的输出上:
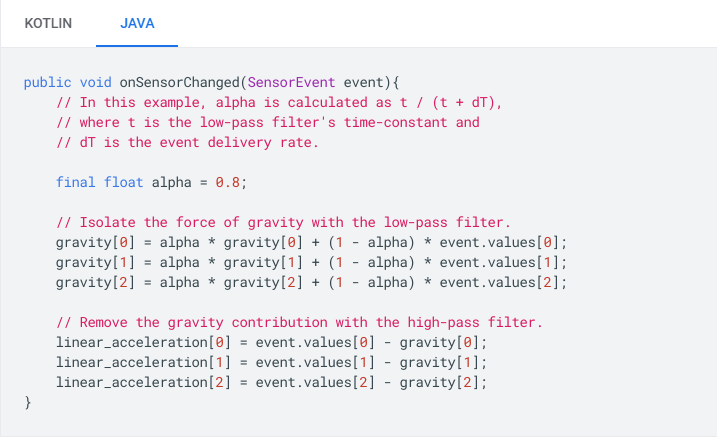
因此,当设备位于桌子上(不加速)时,加速度计的读数为 g = 9.81 m/s2。同样,当设备自由落体并因此以 9.81 m/s2 的速度快速向地面加速时,其加速度计的读数为 g = 0 m/s2。因此,要测量设备的实际加速度,必须从加速度计数据中移除重力的作用。这可以通过应用高通滤波器来实现。相反,您可以使用低通滤波器来隔离重力。以下示例展示如何执行此操作:
以上代码示例使用简单的过滤器常数 (alpha) 来创建低通滤波器。此过滤器常数来自于一个时间常数 (t),该常数大致表示过滤器添加到传感器事件的延迟时间,以及传感器的事件传输率 (dt)。该代码示例使用 0.8 的 alpha 值进行演示。如果您使用此过滤方法,则可能需要选择其他 alpha 值。但通常来讲,低通滤波器会导致数据滞后,对实时响应的场景会有影响(如旋转屏的应用),通常过滤掉重力的方法是利用陀螺仪进行融合,做kalman 滤波,此文就不展开。
2. 陀螺仪传感器
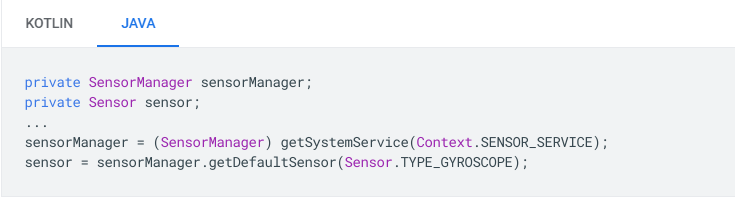
陀螺仪测量围绕设备的 x、y 和 z 轴的旋转速率(弧度/秒)。以下代码展示如何获取默认陀螺仪的实例:
陀螺仪的方法满足右手法则,则如果观察者从 x、y 或 z 轴上某个正位置看向位于原点的设备,则在该设备看起来是逆时针旋转的情况下,该观察者将报告正旋转。标准陀螺仪可提供原始旋转数据,而无需对噪声和漂移(偏差)进行任何过滤或校正。实际上,陀螺仪的噪声和漂移会引入需要补偿的误差。通常,您可以通过监控其他传感器(例如重力传感器或加速度计)来确定漂移(偏差)和噪声。在实际工程中,设备出厂后,也会对陀螺仪进行动态校准,常见的方法是,利用加速度计检测设备是否为静止,若静止时,会扣除陀螺仪的零漂。但这种校准方法存在不及时的局限性,可尝试用加速度计进行姿态融合,进行运动时零漂计算。
陀螺仪的输出可以随时间积分,计算出设备的角度随时间变化的旋转矢量,如:
3. 重力传感器
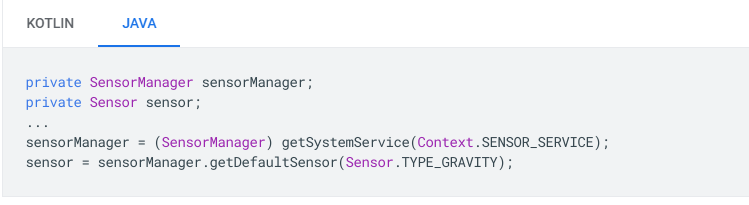
重力传感器通常情况下是软件融合的sensor。提供指示重力方向和大小的三维矢量。通常,此传感器用于确定设备在空间中的相对屏幕方向。以下代码展示如何获取默认重力传感器的实例:
单位与加速度传感器所用的单位 (m/s2) 相同,坐标系与加速传感器使用的坐标系相同。当设备处于静止状态时,重力传感器的输出应与加速度计的输出相同。
4. 线性加速度计传感器
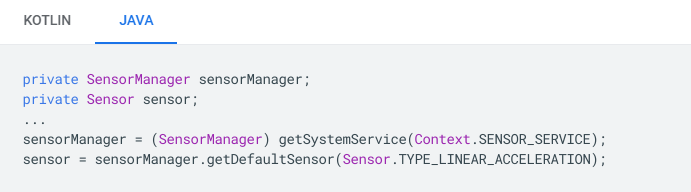
线性加速度计通常情况下是也是软件融合的sensor。线性加速传感器提供了一个三维矢量,表示沿着每个设备轴的加速度(不包括重力)。以下代码展示如何获取默认线性加速传感器的实例:
从概念上讲,此传感器满足以下关系: linear acceleration = acceleration - acceleration due to gravity 当想获取加速度数据而不受重力影响时,通常会使用此传感器。例如,可以使用此传感器查看汽车行驶的速度,可以用来手势检测,还可以用作于惯性导航系统。线性加速度传感器始终具有一个偏移量,需要将其删除。最简单的方法是在应用中构建一个校准步骤。在校准期间,可以要求用户将设备放在桌子上,然后读取所有三个轴的偏移量。然后,您可以从加速传感器的直接读数中减去该偏移量,以获得实际的线性加速度。 传感器坐标系与加速度传感器使用的坐标系相同,计量单位 (m/s2) 也相同。
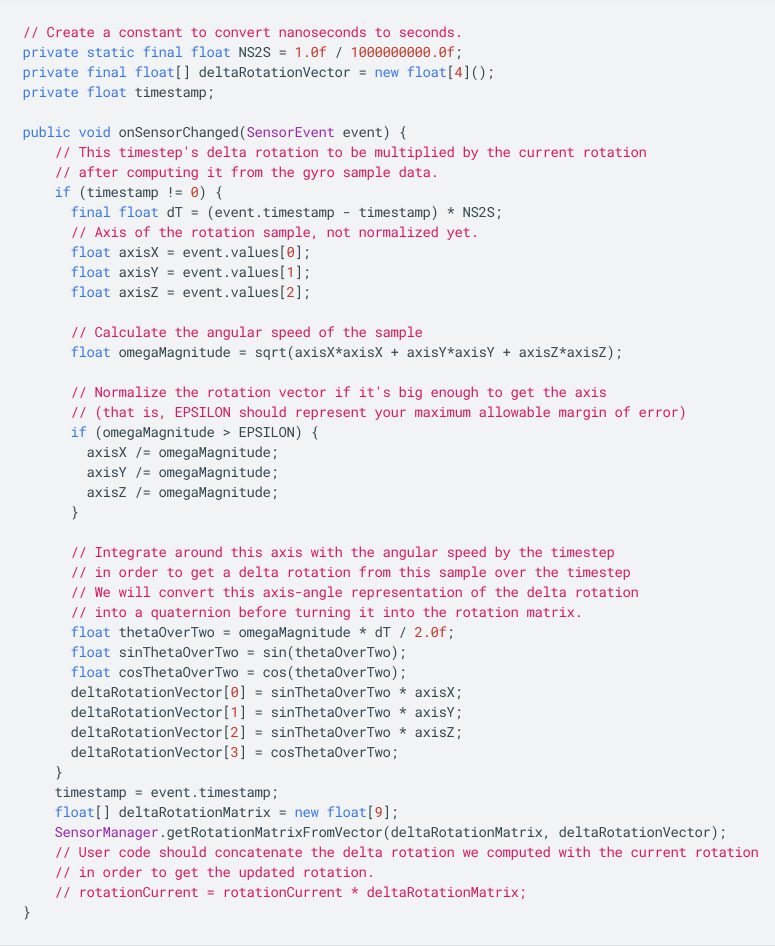
5. 旋转矢量传感器 旋转矢量将设备的屏幕方向表示为角度和轴的组合,其中设备已围绕轴(x、y 或 z)旋转了 θ 度。该传感器输出的结果是一个单位四元数,也叫做旋转矢量。即 Q = [cos(θ/2), x*sin(θ/2), y*sin(θ/2), z*sin(θ/2)]。旋转矢量的元素没有单位。x、y 和 z 轴的定义方法与加速传感器的定义方法相同。该坐标系具有以下特征:
以下代码展示如何获取默认旋转矢量传感器的实例:
四、总结
旋转矢量传感器和重力传感器是运动检测和监控的最常用传感器。旋转矢量传感器极具通用性,可用于各种与运动有关的任务,例如检测手势,监控角度变化,以及监控相对屏幕方向变化。例如,旋转矢量传感器是开发游戏、增强现实应用(AR)、二维或三维指南针,或者相机稳定应用的理想选择。在大多数情况下,使用这些传感器比使用加速度计和地磁场传感器或方向传感器更好。
本文由哈喽比特于3年以前收录,如有侵权请联系我们。
文章来源:https://mp.weixin.qq.com/s/XyRf9V0apHaBZmXPXTnZJg
京东创始人刘强东和其妻子章泽天最近成为了互联网舆论关注的焦点。有关他们“移民美国”和在美国购买豪宅的传言在互联网上广泛传播。然而,京东官方通过微博发言人发布的消息澄清了这些传言,称这些言论纯属虚假信息和蓄意捏造。
日前,据博主“@超能数码君老周”爆料,国内三大运营商中国移动、中国电信和中国联通预计将集体采购百万台规模的华为Mate60系列手机。
据报道,荷兰半导体设备公司ASML正看到美国对华遏制政策的负面影响。阿斯麦(ASML)CEO彼得·温宁克在一档电视节目中分享了他对中国大陆问题以及该公司面临的出口管制和保护主义的看法。彼得曾在多个场合表达了他对出口管制以及中荷经济关系的担忧。
今年早些时候,抖音悄然上线了一款名为“青桃”的 App,Slogan 为“看见你的热爱”,根据应用介绍可知,“青桃”是一个属于年轻人的兴趣知识视频平台,由抖音官方出品的中长视频关联版本,整体风格有些类似B站。
日前,威马汽车首席数据官梅松林转发了一份“世界各国地区拥车率排行榜”,同时,他发文表示:中国汽车普及率低于非洲国家尼日利亚,每百户家庭仅17户有车。意大利世界排名第一,每十户中九户有车。
近日,一项新的研究发现,维生素 C 和 E 等抗氧化剂会激活一种机制,刺激癌症肿瘤中新血管的生长,帮助它们生长和扩散。
据媒体援引消息人士报道,苹果公司正在测试使用3D打印技术来生产其智能手表的钢质底盘。消息传出后,3D系统一度大涨超10%,不过截至周三收盘,该股涨幅回落至2%以内。
9月2日,坐拥千万粉丝的网红主播“秀才”账号被封禁,在社交媒体平台上引发热议。平台相关负责人表示,“秀才”账号违反平台相关规定,已封禁。据知情人士透露,秀才近期被举报存在违法行为,这可能是他被封禁的部分原因。据悉,“秀才”年龄39岁,是安徽省亳州市蒙城县人,抖音网红,粉丝数量超1200万。他曾被称为“中老年...
9月3日消息,亚马逊的一些股东,包括持有该公司股票的一家养老基金,日前对亚马逊、其创始人贝索斯和其董事会提起诉讼,指控他们在为 Project Kuiper 卫星星座项目购买发射服务时“违反了信义义务”。
据消息,为推广自家应用,苹果现推出了一个名为“Apps by Apple”的网站,展示了苹果为旗下产品(如 iPhone、iPad、Apple Watch、Mac 和 Apple TV)开发的各种应用程序。
特斯拉本周在美国大幅下调Model S和X售价,引发了该公司一些最坚定支持者的不满。知名特斯拉多头、未来基金(Future Fund)管理合伙人加里·布莱克发帖称,降价是一种“短期麻醉剂”,会让潜在客户等待进一步降价。
据外媒9月2日报道,荷兰半导体设备制造商阿斯麦称,尽管荷兰政府颁布的半导体设备出口管制新规9月正式生效,但该公司已获得在2023年底以前向中国运送受限制芯片制造机器的许可。
近日,根据美国证券交易委员会的文件显示,苹果卫星服务提供商 Globalstar 近期向马斯克旗下的 SpaceX 支付 6400 万美元(约 4.65 亿元人民币)。用于在 2023-2025 年期间,发射卫星,进一步扩展苹果 iPhone 系列的 SOS 卫星服务。
据报道,马斯克旗下社交平台𝕏(推特)日前调整了隐私政策,允许 𝕏 使用用户发布的信息来训练其人工智能(AI)模型。新的隐私政策将于 9 月 29 日生效。新政策规定,𝕏可能会使用所收集到的平台信息和公开可用的信息,来帮助训练 𝕏 的机器学习或人工智能模型。
9月2日,荣耀CEO赵明在采访中谈及华为手机回归时表示,替老同事们高兴,觉得手机行业,由于华为的回归,让竞争充满了更多的可能性和更多的魅力,对行业来说也是件好事。
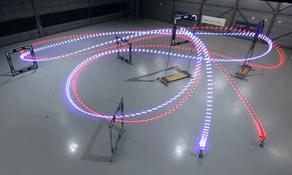
《自然》30日发表的一篇论文报道了一个名为Swift的人工智能(AI)系统,该系统驾驶无人机的能力可在真实世界中一对一冠军赛里战胜人类对手。
近日,非营利组织纽约真菌学会(NYMS)发出警告,表示亚马逊为代表的电商平台上,充斥着各种AI生成的蘑菇觅食科普书籍,其中存在诸多错误。
社交媒体平台𝕏(原推特)新隐私政策提到:“在您同意的情况下,我们可能出于安全、安保和身份识别目的收集和使用您的生物识别信息。”
2023年德国柏林消费电子展上,各大企业都带来了最新的理念和产品,而高端化、本土化的中国产品正在不断吸引欧洲等国际市场的目光。
罗永浩日前在直播中吐槽苹果即将推出的 iPhone 新品,具体内容为:“以我对我‘子公司’的了解,我认为 iPhone 15 跟 iPhone 14 不会有什么区别的,除了序(列)号变了,这个‘不要脸’的东西,这个‘臭厨子’。